Inerces moments: definīcija, formula un pielietojums fizikā
Inerces moments: definīcija, formula un fizikālās pielietošanas piemēri — skaidrojumi un aprēķinu soļi studentiem un pētniekiem.
Inerces moments ( I {\displaystyle I} ), ko sauc arī par "leņķisko masu" (kg-m2 ), ir rotējoša ķermeņa inerce attiecībā pret tā rotāciju.
), ko sauc arī par "leņķisko masu" (kg-m2 ), ir rotējoša ķermeņa inerce attiecībā pret tā rotāciju.
Tā ir rotējoša ķermeņa pretestība leņķiskajam paātrinājumam vai palēninājumam, kas vienāda ar masas un perpendikulārā attāluma no rotācijas ass kvadrāta reizinājumu.
Attēlu galerija
10 Attēli






Definīcija un vispārīgā formula
Matemātiski inerces moments attiecībā pret dotu asi apraksta integrāls:
I = ∫ r² dm,
kur r ir masas elementa perpendikulārais attālums līdz rotācijas asij, un dm — masas elements. Diskrētai sistēmai ar punktmassām formula kļūst par summu: I = Σ mi ri².
Vienības: kg·m². Dimensija: masa × garums².
Būtiskās formulas un likumi
- Paralēlo asi teorema (Steiner teorema): ja zināms inerces moments ap masu centru Icm, tad inerces moments ap asi, kas atrodas attālumā d no masas centra, ir I = Icm + M d², kur M — visa ķermeņa masa.
- Perpendikulāro asi teorema plānai lamīnai, ja zināmi Ix un Iy plaknē, tad Iz = Ix + Iy (par kuru attiecināms, ja z ass ir perpendikulāra plaknei).
- Rotācijas dinamika: moments (griezes moments) τ un leņķiskais paātrinājums α saistīts ar τ = I α.
- Leņķiskā impulsa un kinētiskā enerģija: leņķiskais impulss L = I ω, rotācijas kinētiskā enerģija E = ½ I ω², kur ω — leņķiskā ātruma lielums.
- Inerces moments kā tensora lielums: parasti inerces moments ir skalāra atkarībā no izvēlētās ass, taču vispārīgāk to apraksta 3×3 tensors Iij, kas nepieciešams nelineāru vai trīsdimensiju rotāciju analizēšanai. Galvenās ass, kurās tensora matricas tiek diagonalizētas, sauc par principālajām asīm.
Bieži lietotas formulas parastiem ķermeņiem
- Plāna vienmērīga stieņa garumā L, rotācija ap centru perpendikulāri stiepei: I = (1/12) M L²
- Plāna stieņa ap galu: I = (1/3) M L²
- Cietas nepilnīgas cilindra ass (apakšējā) gareniska ass: I = (1/2) M R²
- Hollow (tukša) cilindra ap asi: I = M R²
- Cieta sfēra ap centru: I = (2/5) M R²
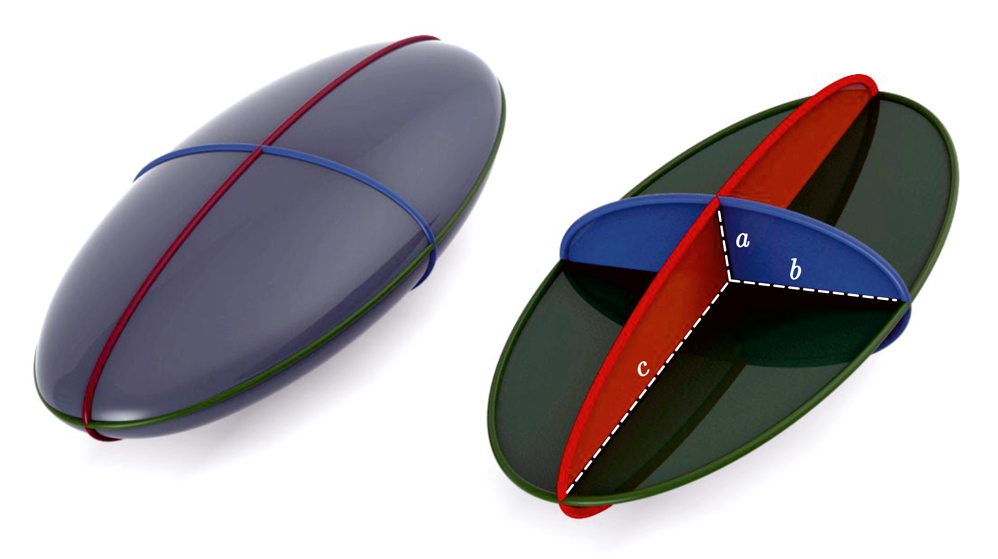
- Plakana taisnstūra plāksne ap centru perpendikulāri plāksnei: I = (1/12) M (a² + b²), kur a un b — malu garumi.
Šīs formulas attiecas uz vienmērīgi sadalītu masu; ja blīvums nav homogēns, jāveic integrāls I = ∫ r² dm ar attiecīgo blīvuma funkciju.
Vienkāršs piemērs
Divām punktmasām m1 un m2, kas atrodas attālumos r1 un r2 no ass, inerces moments ir I = m1 r1² + m2 r2². Piemēram, ja m1 = m2 = 1 kg un r1 = 0.5 m, r2 = 0.5 m, tad I = 1·0.5² + 1·0.5² = 0.5 kg·m².
Noteikšana praksē
- Torsionālais rezonators: izmēra atgriešanās moments un leņķiskā frekvence ļauj aprēķināt I.
- Fiziskā svārsta periods: mērot svārsta periodu un zinot attālumu līdz masas centram, var iegūt I.
- Direkta modelēšana: sarežģītus ķermeņus sadala elementāros daļos vai izmanto skaitliskās metodes (piem., finišu elementu metodi) konstruktīvajā projektēšanā.
Fizikālā nozīme un pielietojums
Inerces moments nosaka, cik grūti ir izmainīt rotācijas stāvokli. Lielāks I nozīmē lielāku pretestību leņķiskajam paātrinājumam pie dotā griezes momenta. Tas ir būtiski:
- meklējot stabilitāti un vadāmību transportlīdzekļos (rata inerces moments ietekmē vadāmību);
- projektējot dzinējus, ģeneratorus un liela apgriezienu ierīces (flywheels);
- kosmiskajās tehnikās un žiroskopos (kontrolei un stabilizācijai);
- robotikā un biomehānikā (kustību plānošana un regulatoru projektēšana).
Padomi aprēķinam
- Ja ķermenis sastāv no vairākiem elementiem, aprēķiniet katra elementa I ap izvēlēto asi un summējiet.
- Ja ass nav caur masas centru, izmantojiet paralēlo asi teoremu.
- Sarežģītākos gadījumos izmantojiet integrālus vai datorprogrammas, kas spēj aprēķināt inerces tensoru.
Inerces moments ir pamatelements rotācijas dinamikā, tāpēc tā pareiza izpratne un aprēķins ir būtisks inženierzinātnēs, fizikā un tehniskajā dizainā.

Saistītās lapas
- Leņķa moments
- Griezes moments
Jautājumi un atbildes
J: Kas ir inerces moments?
A: Inerces moments ir rotējoša ķermeņa inerce attiecībā pret tā rotāciju.
J: Kā citādi sauc inerces momentu?
A: Cits inerces momenta nosaukums ir "leņķiskā masa".
J: Kāda ir inerces momenta mērvienība?
A: Inerces momenta mērvienība ir kg-m2.
J: Kāda ir inerces momenta nozīme?
A: Inerces moments ir rotējoša ķermeņa pretestība pret leņķisko paātrinājumu vai palēninājumu.
J: Ar kādu vienādojumu aprēķina inerces momentu?
A: Inerces momenta aprēķina vienādojums ir I = mr^2, kur m ir rotējošā ķermeņa masa un r ir rādiuss, ko mēra perpendikulāri rotācijas asij.
J: Kā masa ietekmē inerces momentu?
A: Rotējošā ķermeņa masa ietekmē inerces momentu tieši, jo tā ir daļa no inerces momenta aprēķina vienādojuma.
J: Kā rādiuss ietekmē inerces momentu?
A: Rotējošā ķermeņa rādiuss ietekmē inerces momentu netieši, jo inerces momenta aprēķina vienādojumā tas tiek reizināts ar tā vērtības kvadrātu.
Saistītie raksti
Autors
AlegsaOnline.com Inerces moments: definīcija, formula un pielietojums fizikā Leandro Alegsa
URL: https://lv.alegsaonline.com/art/65911
Avoti
- books.google.com : Feedback Control Theory for Engineers