Dead Reckoning (DR): atrašanās vietas noteikšana bez GPS
Dead Reckoning (DR): uzzini, kā noteikt atrašanās vietu bez GPS — DR principi, vēsturiskie piemēri un pielietojums jūrniecībā, aviācijā un sauszemes navigācijā.
Mirušā stāvokļa noteikšana (angļu valodā Dead Reckoning jeb DR) ir atrašanās vietas noteikšanas metode, kas ir svarīga navigācijas praksē. DR aprēķina pašreizējo pozīciju, sākot no pēdējā zināmā punkta (fiksētā punkta) un izmantojot informāciju par noliktā līnijas attālumu vai ātrumu, laiku un virzienu, kādā transportlīdzeklis vai persona ir pārvietojusies kopš tā punkta.
Attēlu galerija
3 Attēli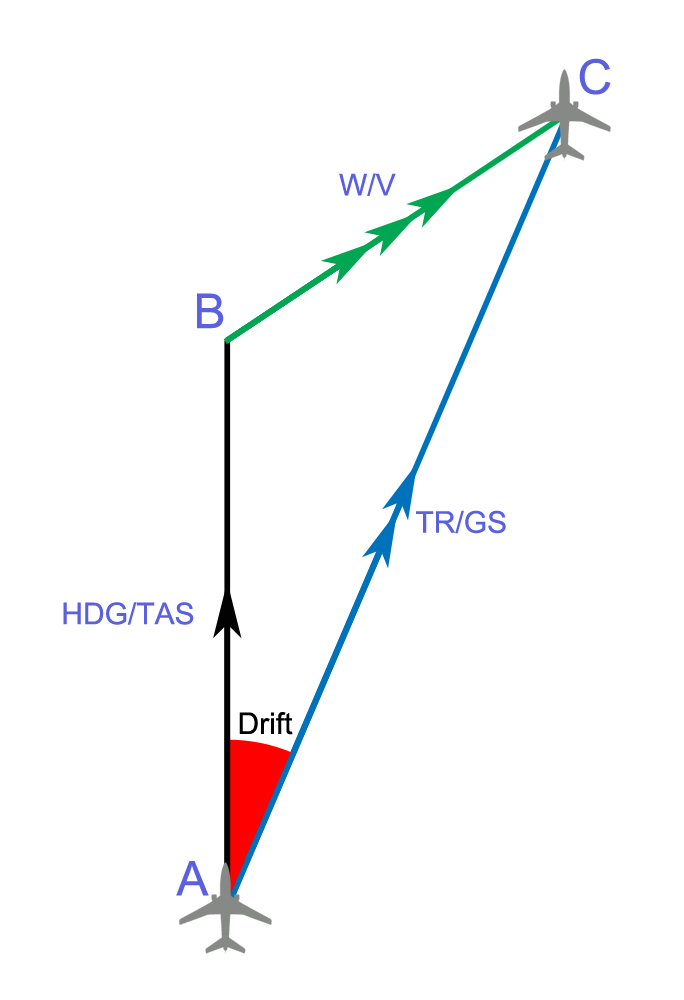


Kā tas darbojas
Vienkāršā formā pozīciju aprēķina, summējot iepriekšējo pozīciju un pārvietoto ceļu (attālumu un virzienu) — matemātiski: ja zināms ātrums un virziens laikā t, tad jaunā pozīcija = iepriekšējā pozīcija + ātrums × laiks (vektoru summēšana kartes koordinātēs). Praktiski tas nozīmē, ka, ja zināt sākumpunktu un uzticami mērāt kustības virzienu un attālumu, varat prognozēt, kur atrodaties, pat bez ārējiem signāliem.
Sensoru un datu avoti
DR izmanto dažādus iekšējos sensorus un mērījumus, piemēram:
- kompasus (magnētiskos vai digitālos) virziena noteikšanai,
- žiroskopus un giroskopiskās sistēmas (IMU) rotācijas un orientācijas mērīšanai,
- paātrinājuma mērītājus (akselerometrus) ātruma vai nobraukuma aprēķinam,
- odometrus vai ātruma rādītājus (piem., kuģu speed log),
- inertial navigācijas sistēmas (INS), kas apvieno dažādus sensorus,
- kartes un vietas konstatācijas (piem., zīmju vai orientieru salīdzināšana).
Mūsdienās DR bieži tiek sapludināta (sensoru fūzija) ar globālā pozicionēšanas sistēma (GPS) un citām korekcijas metodēm, piemēram, Kalmaņa filtriem, lai samazinātu kļūdas.
Kļūdu uzkrāšanās un korekcija
Galvenais DR ierobežojums ir kļūdu akumulācija: nelielas novirzes virzienā, ātruma vai laika mērījumos laika gaitā sakrājas un var izraisīt lielas pozīcijas novirzes (drift). Lai to mazinātu, izmanto:
- periodiskas korekcijas no ārējiem avotiem (piem., GPS vai satelīti),
- zemes orientieru (visu redzamu zemes gabalu) vai zvaigžņu (celestial) novērojumus,
- kartes saskaņošanu (map matching) — pozīcijas ierobežošanu, balstoties uz zināmu ceļu tīklu vai ūdens ceļiem,
- signālu un sensoru kalibrāciju, nulles ātruma atjauninājumus (zero-velocity updates) un sarežģītākus filtrus sensoru fūzijai.
DR ir īpaši noderīga situācijās, kad GPS nav pieejams vai tiek zaudēts īslaicīgi — piemēram, tuneļos, iekštelpās, ūdenī, polārajās zonās vai militāros apstākļos, kad saules uzliesmojums var bojāt satelītus.
Lietojuma piemēri un prakse
DR tiek izmantota kuģošanā, aviācijā, sauszemes transportā, zemūdenēs, robotikā, kā arī mobilajās lietotnēs un paplašinātās realitātes sistēmās, kur nepieciešams noturēt pozīciju bez ārējās atskaites. Pat ja mūsdienās plaši izmanto GPS, DR joprojām ir būtiska rezerves metode un tiek mācīta jūrniekiem un pilotiem drošības un atsevišķu situāciju risināšanai.
Vēsturiskie aspekti
Pirms precīzu pulksteņu, izveides jūrnieki varēja noteikt tikai ģeogrāfisko platumu ar zvaigžņu palīdzību, bet garumu (austrumu–rietumu pozīciju) bija grūtāk noteikt. Tādēļ okeānu šķērsošanā plaši izmantoja mirušās pozīcijas metodes (dead reckoning), apvienojot virziena un attāluma mērījumus ar novērojumiem. Piemēram, pēc Kristofora Kolumba laikiem šie paņēmieni bija rutīna jūrniecībā. Tāpat Ričards Bīrds 1926. gadā, lidojot uz Ziemeļpolu, izmantoja līdzīgas metodes, lai sekotu savai maršruta trajektorijai un atgrieztos pie izcelšanās vietas, pat pārlidojot plašus, vienveidīgus ledu laukus.
Praktiski padomi
- Regulāri kalibrējiet kompasus, žiroskopus un citus sensorus.
- Saglabājiet sākumpunktus un kontrolpunktus (fiksētos punktus), kuros var veikt korekcijas.
- Apvienojiet DR ar citiem datu avotiem (GPS, kartes, vizuālie orientieri) — tas samazina driftu.
- Uzmanieties no vides faktoriem (magnētiskās anomālijas, temperatūras ietekme uz sensoru darbību), kas var palielināt kļūdas.
Mirušā stāvokļa noteikšana ir vienkārša ideja ar plašām pielietošanas iespējām un būtisku lomu drošībā, it īpaši situācijās, kad ārējie pozīcijas avoti nav uzticami vai pieejami.

Metode
Aprēķins pēc nullā stāvokļa sākas no zināma punkta (fiksācijas). Tad ir jāzina transportlīdzekļa ātrums. Senos laikos kuģi pārmeta pāri bortam baļķi (piesietu pie virves) un skaitīja, cik ilgā laikā šis baļķis tika pārmests (vai arī vilka virvi ar mezgliem un skaitīja, cik mezglu noteiktā laikā tiek izvilkts). Tas ļautu noteikt kuģa ātrumu. Zinot virzienu no kompasa, varētu noteikt virzienu. No šiem diviem skaitļiem varētu veikt aplēsi (labu minējumu) par transportlīdzekļa pašreizējo atrašanās vietu. Tomēr vējš virza transportlīdzekli uz vienu pusi (ko sauc par dreifu), tāpēc arī tas ir jāmēra. Arī ūdenī ir straumes, pat okeāna vidū. Laika gaitā arī tas var radīt kļūdas, tāpēc tika izveidotas kartes, kurās tika koriģētas straumes.
Lidmašīnas var viegli izmērīt vēja ātrumu (cik ātri tās pārvietojas gaisā), bet ne to, cik ātri tās pārvietojas virs zemes (tā saucamais zemes ātrums). Pretvējš, sānvējš vai sānvējš maina zemes ātrumu. Ja ir zināms lidmašīnas augstums, tad zemes ātrumu var noteikt, nosakot laiku, cik ātri lidmašīna iet garām objektam uz zemes. (Jo augstāk jūs atrodaties, jo lēnāka šķiet zemes kustība). Lai atrastu zemes ātrumu un lidmašīnas dreifu, var izmantot lidmašīnas grīdas logu.
Uz zemes esošs transportlīdzeklis var izmantot arī mirušo skaitli. Parasti tiem nav jāuztraucas par vēja radīto dreifu, un uz sauszemes nav straumju, tāpēc šāda aprēķināšana ir vienkāršāka.
Jautājumi un atbildes
J: Kas ir Dead Reckoning?
A: Mirušā stāvokļa noteikšana (jeb DR) ir metode, ar kuras palīdzību nosaka atrašanās vietu, izmantojot pēdējo zināmo punktu, kustības ātrumu un virzienu.
J: Kādam nolūkam izmanto mirušā stāvokļa noteikšanu?
A: Mirušā stāvokļa noteikšanu izmanto, lai noteiktu kuģa, lidmašīnas vai transportlīdzekļa atrašanās vietu.
J: Kāpēc tagad mirušā stāvokļa noteikšanu vairs tik bieži neizmanto?
A: Tagad navigācijai izmanto globālo pozicionēšanas sistēmu (GPS), tāpēc mirušās koordinātas ir mazāk svarīgas.
J: Kādās situācijās Dead Reckoning joprojām ir noderīgs?
A: Mirušā laika noteikšana ir noderīga apgabalos, kur GPS nav pieejams, vai īslaicīgi, ja GPS atjauninājums netiek saņemts.
J: Kādēļ ir svarīgi zināt par Dead Reckoning?
A: Zināšanas par mirušās koordinātas noteikšanu ir svarīgas gadījumā, ja GPS satelīti tiek bojāti vai iekārtas tiek pazaudētas, lai jūrnieki un piloti joprojām varētu veikt navigāciju.
J: Kā pēc Kristofora Kolumba ierašanās Jaunajā pasaulē jūrnieki kartografēja pasauli?
A: Lai noteiktu ģeogrāfisko platumu un kartētu pasauli, jūrnieki izmantoja mirušā laika noteikšanu un zvaigznes.
Jautājums: Kā Ričards Bērds kļuva par pirmo cilvēku, kas aizlidoja uz Ziemeļpolu?
A: Ričards Bērds izmantoja Dead Reckoning, lai 1926. gadā aizlidotu uz Ziemeļpolu, lidojot 16 stundas un atgriežoties vietā, no kuras viņš bija izlidojis, un zem viņa bija tikai ledus lauki.
Saistītie raksti
Autors
AlegsaOnline.com Dead Reckoning (DR): atrašanās vietas noteikšana bez GPS Leandro Alegsa
URL: https://lv.alegsaonline.com/art/25956
Avoti
- deadreckoning.com : "Reckoning Aviation Navigation"
- belfortinstrument.com : "How Byrd Navigated to the North Pole"
- ship468.org : "Sea Scout Ship, Navigation"